Active Sensing End Effector for Robotic Ultrasound
Devised an endeffector for robotic ultrasound system, automating probe orientation perpendicular to patient surface using depth cameras.
Enthusiastic Robotics Engineering student at WPI and Researcher at Medical Fusion Lab.
Crafting the algorithms that teach machines to perceive, navigate, and interact with the world autonomously.
Looking to colloborate on cutting edge robotics-project🤖? geek out over automotives🏎, discover epic treking spots🧗 , or challenge me to a swim 🏊? let's connect 🙂
Robotics Engineering graduate student at WPI, Researcher at Medical Fusion Lab, developing robotic system using franka robot for automated multiview OCT Imaging of transplant kidney with autofocus. Specalizing in Deep Learning, Localization, Mapping, Computer Vision and advanced robot control systems, driving future of intelligent automation in Medical Imaging.
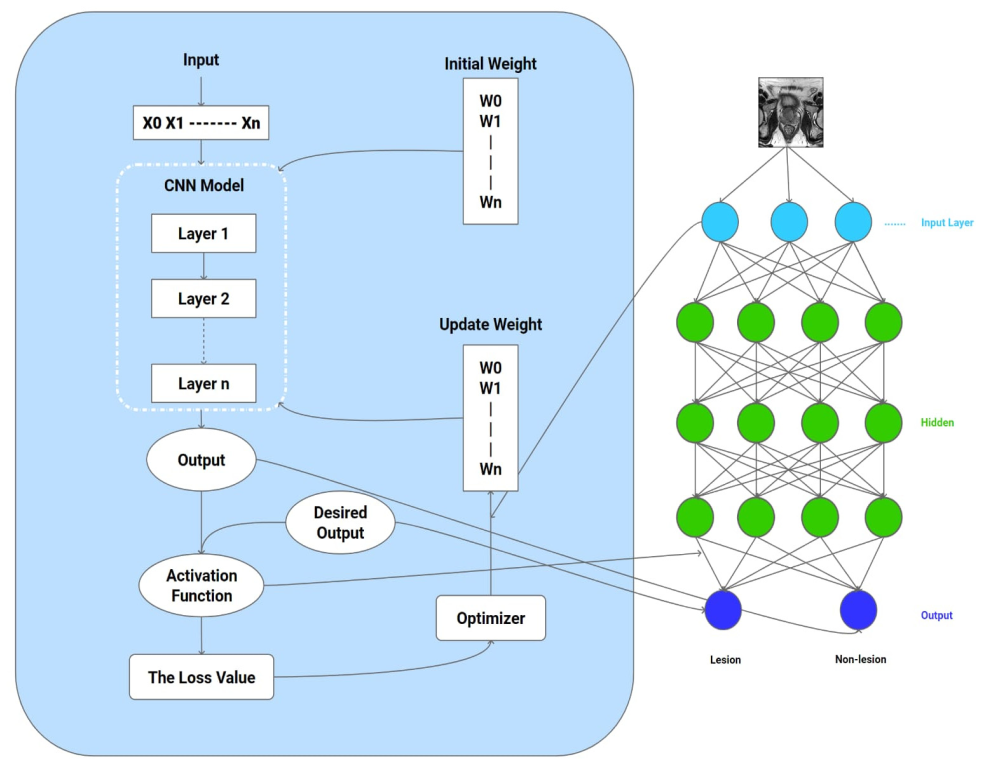
With 2 years of experience as a Software Engineer at Wipro, I engineered advanced machine learning and perception algorithms to accurately detect prostate cancer in 3D MRI scans, driving impactful innovations in medical imaging.

developing multiview OCT imaging of kidney pre transplantation with autofocus, under Prof. Haichong Zhang
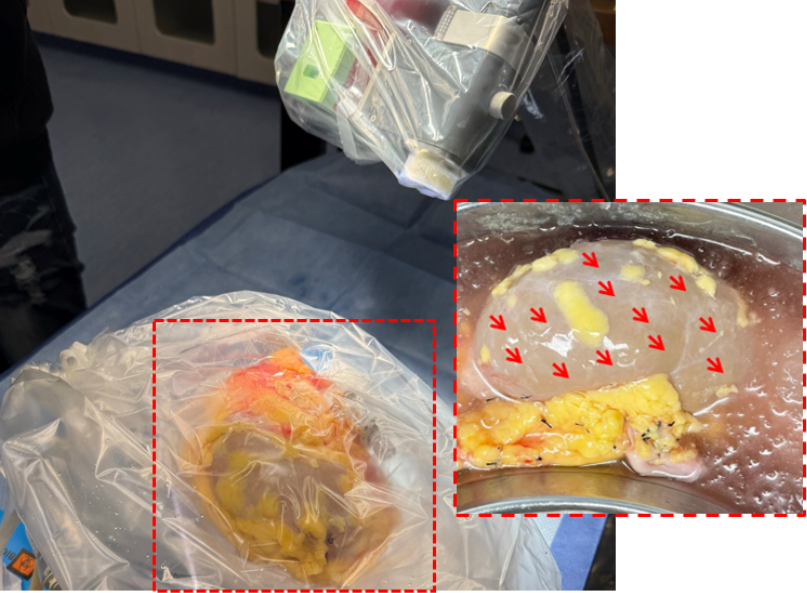
Using Optical Coherence Tomography with franka robot to scan kidney transplant.
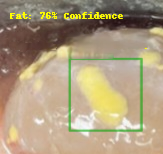
Trained a U-Net model to detect kidney capsule and fat from OCT probe RGB feed for adaptive scan acquisition.
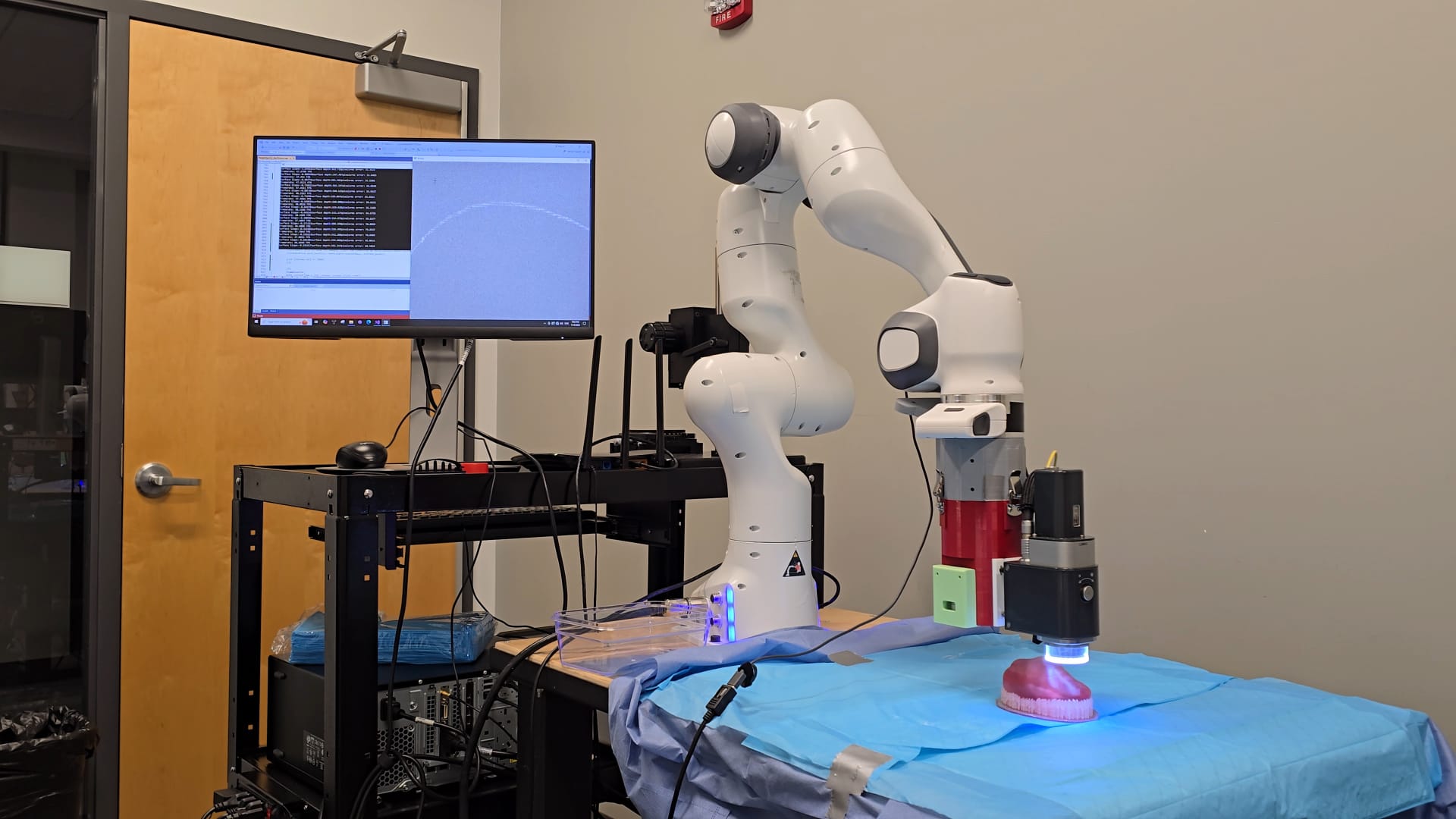
Planned Trajectory around organ for efficient scanning
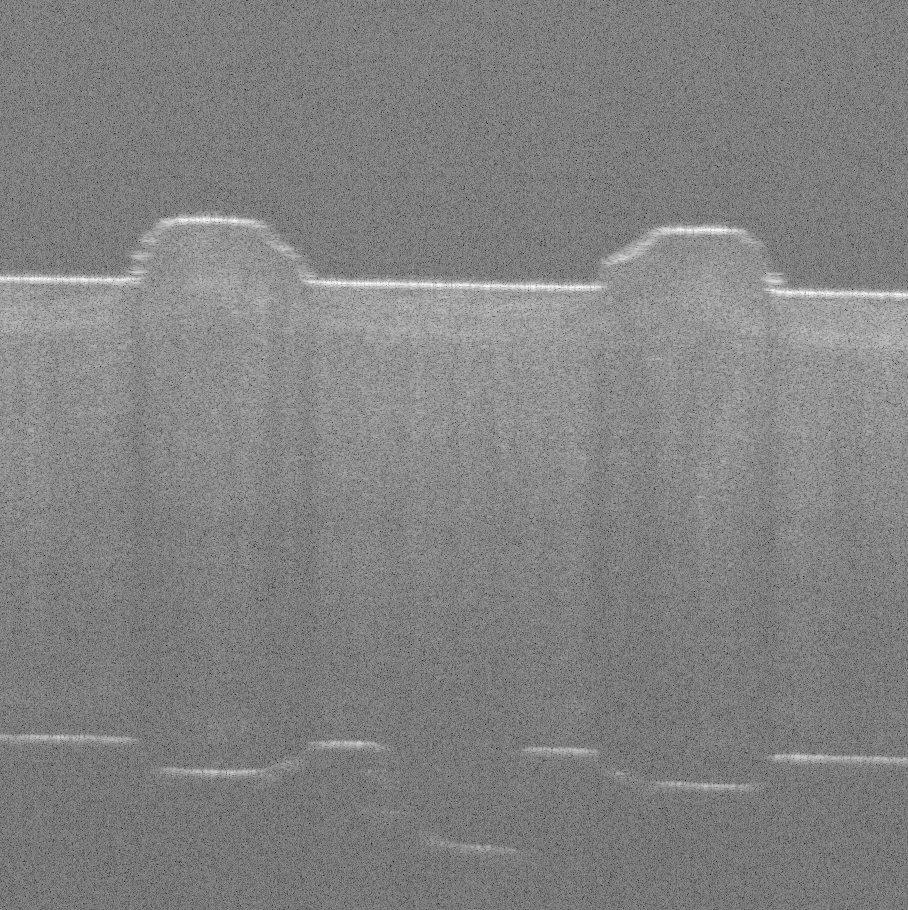
Converted OCT B-scans into Depthmaps and Volumes
Developed a deep learning pipeline for prostate cancer detection from MRI
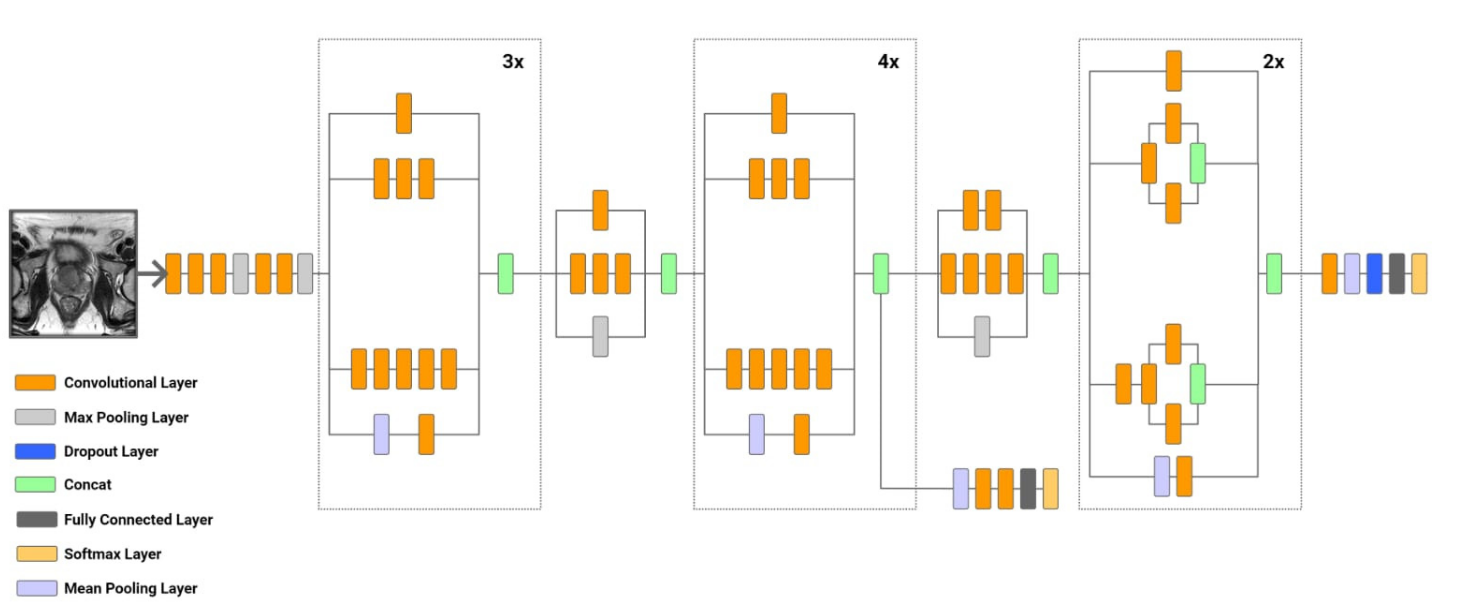
Developed a 3D Convolutional Neural Network (CNN) to accurately detect prostate cancer from MRI scans, enabling automated analysis of volumetric medical images.
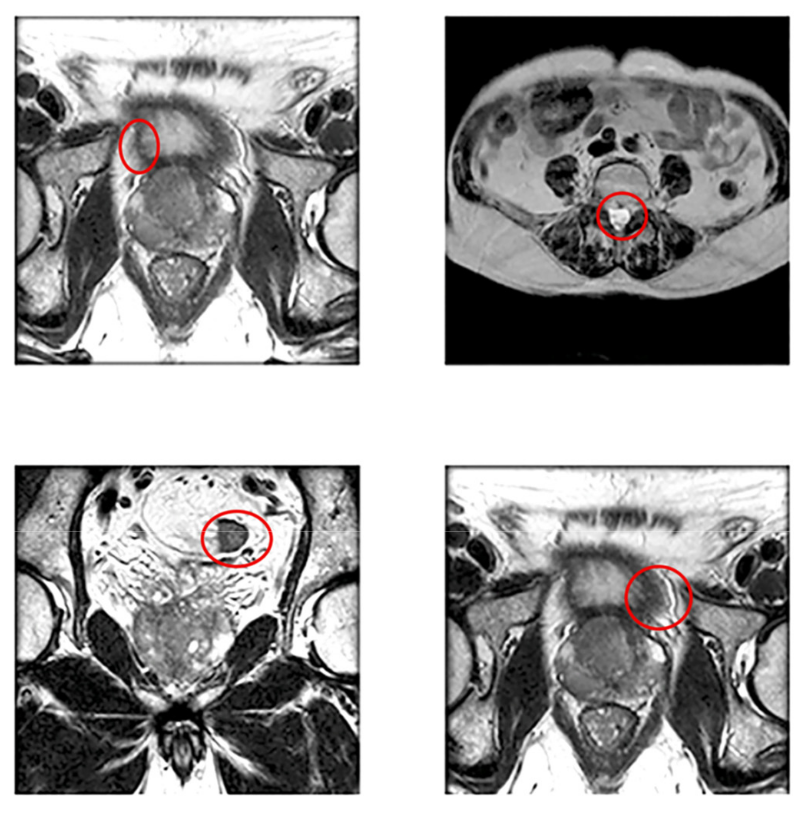
Augmented 3D MRI data using Slicer3D simulations, applying techniques such as rotation, clipping, and synthetic data generation to enhance model robustness.
Optimized the deep learning model using pruning and quantization techniques to reduce model size and improve inference speed without sacrificing accuracy.
Conducted model evaluation on a clinical dataset using requirements-driven development and rigorous validation and testing methodologies, ensuring 98% sensitivity and seamless integration into the diagnostic workflow.

Devised an endeffector for robotic ultrasound system, automating probe orientation perpendicular to patient surface using depth cameras.
Simulated a pick-and-place operation for the ABB IRB 1200 robot, designing station logic for attacher and detacher mechanisms and defining precise robotic paths to automate the process, demonstrating advanced skills in robotic programming and process optimization.
Comparison of traditional planners such as RRT, A* with end to end learning approaches for indoor Embodied navigation.

Optimized NeRF model to reconstruct 3D scenes with a 5 × 10−4 pixel loss by refining positional encoding and MLP architecture.Rendered novel 3D views from radiance fields, improving accuracy through data engineering and enhancing visual fidelity.
LSTM-based deep learning model for Visual-Inertial Odometry using image datasets and IMU data, achieving a localization error of 0.0237m on the Euroc_MAV dataset.
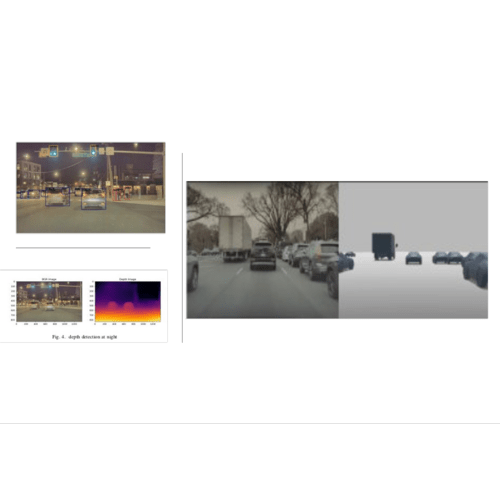
Processed Tesla camera feed using MiDaS for depth and YOLOv8 for segmentation, identifying cars, lanes, and pedestrians in 3D space. Reconstructed 3D environments by calculating object positions from depth and placing assets in Blender, simulating Tesla’s dashboard.
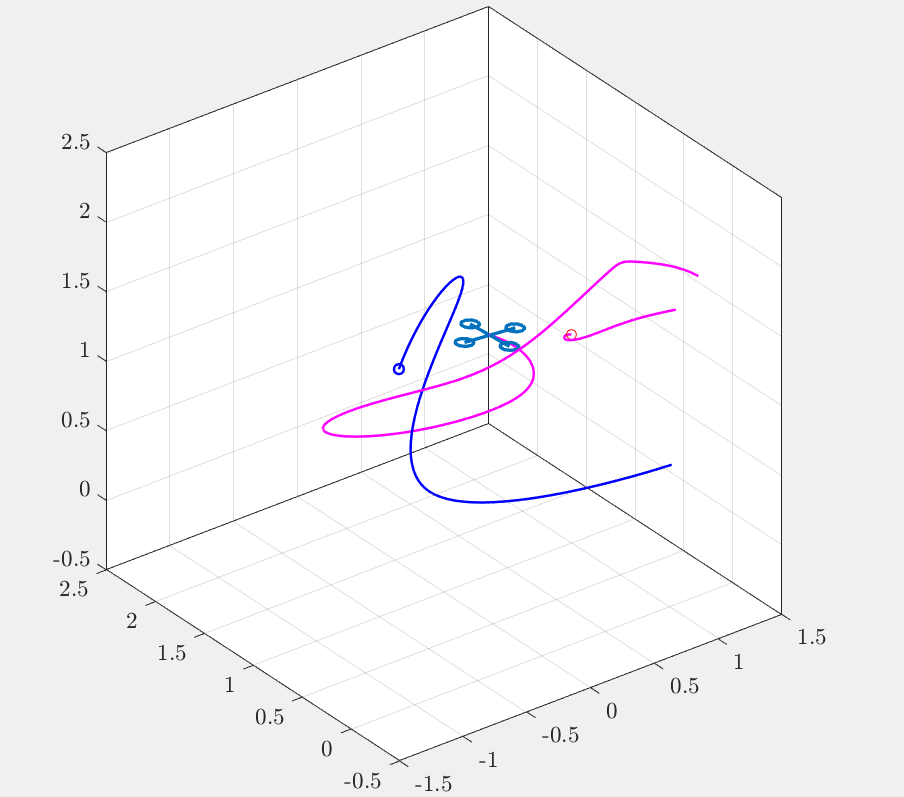
Designed a feed-forward control algorithm for a quadcopter in MATLAB, attaining alignment with ±1.45 cm error for midair refueling. Developed a dynamic model for a quadcopter along with simulating mass discharge enabling accurate representation of the quadcopter.

Developed a deep learning model using HomographyNet to predict homography between image pairs, Executed image morphing and stitching processes using predicted homographies.
Developed dynamic model of open manipulator x robot using solid works, enabling precise control within 1mm error. Designed controller for manipulator utilizing Computed Torque Controller to follow a trajectory generated by quintic polynomial profiles. Integrated camera based object detection with 95% accuracy and inverse kinematics to to pick and place object at a desired place.
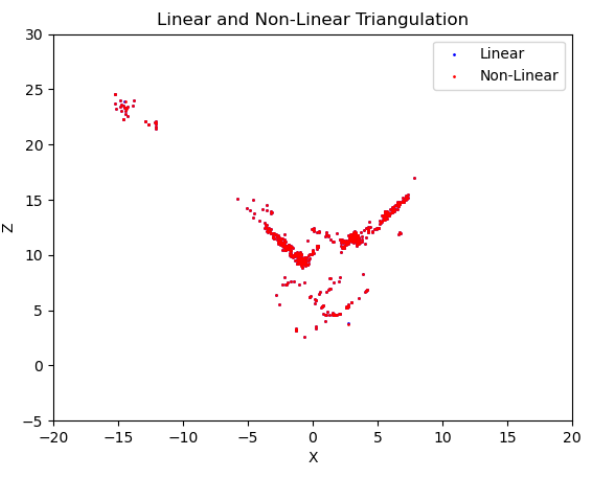
Executed Structure from Motion by capturing images, matching features, performing bundle adjustment, and estimating 3D points.
ROS2-Python Implementation of accurate realtime simultaneous localization and mapping
Ready to dive in? Drop your info and let's make something awesome happen!